2002年評為無錫市高新技術(shù)企業(yè)、2007年評為江蘇省高新技術(shù)企業(yè),并通過ISO9001認(rèn)證,AAA級資信企業(yè)
摘 要:針對拉幅定型機(jī),設(shè)計(jì)一種基于485總線的分布式監(jiān)控系統(tǒng)。用ARM 嵌入式控制器實(shí)現(xiàn)主、從電機(jī)的同步運(yùn)行和烘房溫度的控制;在PC機(jī)上用VB6.0設(shè)計(jì)轉(zhuǎn)速和溫度的監(jiān)控畫面;實(shí)現(xiàn)ARM、變頻器和PC機(jī)之間的數(shù)據(jù)通信。結(jié)果表明,該系統(tǒng)實(shí)現(xiàn)簡單,通信可靠,移植性強(qiáng),在印染設(shè)備監(jiān)控中具有很強(qiáng)的推廣性。
關(guān)鍵詞:嵌入式;RS一485;印染設(shè)備;uClinux;監(jiān)控
Abstract:For tentering and thermo—fixing machine,a distributed monitoring system based on the 485 bus is designed.Weachieve the control of themasterand slaver AC motor synchronization and temperature of the drying oven by the ARM embeddedcontroller.We also design the monitoring picture of the speed and temperature on the host PC with VB6.0 and achieve the datacommunication of ARM controller and inverter with PC.The results shoW that the system is simple and communication is reliable,and it can easily transplant and strongly expand to monitoring systems of printing equipment.
Key words:embedded;RS一485;printing equipment;uClinux ;monitoring
1 引 言
隨著工業(yè)自動(dòng)化進(jìn)程的推進(jìn)和企業(yè)信息化程度的提高,利用遠(yuǎn)端智能模塊和RS一485網(wǎng)絡(luò)構(gòu)建監(jiān)控工作分散、監(jiān)控結(jié)果集中的分布式監(jiān)控系統(tǒng),由于投資費(fèi)用低、結(jié)構(gòu)簡單、實(shí)現(xiàn)容易、通信距離長、抗噪聲等優(yōu)點(diǎn),在工業(yè)控制中得到了廣泛的應(yīng)用。而微電子技術(shù)和自動(dòng)控制技術(shù)的發(fā)展。以及計(jì)算機(jī)技術(shù)迅速向非計(jì)算機(jī)領(lǐng)域的滲透,特別是32位微處理器ARM 在國內(nèi)外的廣泛應(yīng)用,使數(shù)字化、網(wǎng)絡(luò)化和智能化控制,成為新一代印染控制設(shè)備的主要發(fā)展方向。
我們針對拉幅定型機(jī)主、從電機(jī)的同步運(yùn)行和烘房溫度控制系統(tǒng)進(jìn)行監(jiān)控,實(shí)現(xiàn)了微機(jī)(PC機(jī))與MICR.master440變頻器的設(shè)站通訊,配合漢化下拉式菜單和畫面顯示,以及必要的操作提示,可完成對變頻器參數(shù)的設(shè)定、運(yùn)行參數(shù)的監(jiān)測、運(yùn)行數(shù)據(jù)和故障數(shù)據(jù)的采集。嵌入式控制器ARM除控制拉幅定型機(jī)主、從電機(jī)的同步和烘房的溫度外,還通過RS一485網(wǎng)絡(luò),將主、從電機(jī)的轉(zhuǎn)速和烘房溫度數(shù)據(jù),傳送給上位機(jī)畫面實(shí)時(shí)顯示。
2 系統(tǒng)的總體設(shè)計(jì)
圖1為系統(tǒng)的總體框圖。
ARM控制器通過兩路光電脈沖發(fā)生器PG1和PG2,同時(shí)采集拉拉幅定型機(jī)的主、從電機(jī)M1和M2的轉(zhuǎn)速,經(jīng)計(jì)算后求出兩電機(jī)的轉(zhuǎn)速偏差,再經(jīng)過智能算法,輸出控制量,調(diào)整從動(dòng)機(jī)的轉(zhuǎn)速,使之跟隨主動(dòng)機(jī)。由于是變頻器驅(qū)動(dòng),控制量要轉(zhuǎn)換為頻率的變化量。ARM 控制器按確定的數(shù)據(jù)結(jié)構(gòu),把控制量送給PC機(jī),PC機(jī)通過485接口與變頻器通訊,調(diào)節(jié)變頻器2輸出頻率,從而控制從動(dòng)機(jī)M2的轉(zhuǎn)速,使之與主電機(jī)同步運(yùn)行。
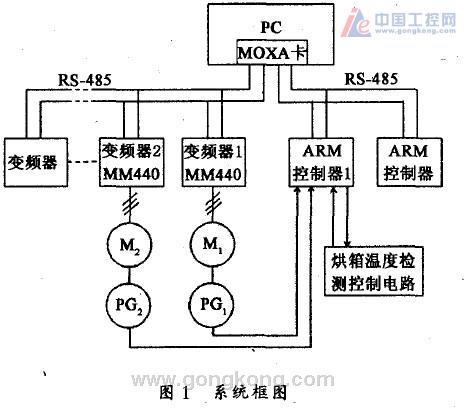
ARM控制器還通過溫度檢測控制電路,采集烘房溫度,經(jīng)過適合的算法,對烘房溫度進(jìn)行控制。這里重點(diǎn)介紹PC機(jī)與變頻器和嵌入式控制器的RS一485接口設(shè)計(jì)。整個(gè)系統(tǒng)采用RS一485總線標(biāo)準(zhǔn)進(jìn)行數(shù)據(jù)傳輸。PC機(jī)采用研華的MOX—A CP一132UL卡,它是專為工業(yè)通訊環(huán)境設(shè)計(jì)的RS一422/485二串口卡,它支持2個(gè)獨(dú)立的RS一422或RS一485串口,在一對多點(diǎn)應(yīng)用環(huán)境中,每個(gè)串口較多可控制32個(gè)設(shè)備。每塊卡采用自動(dòng)數(shù)據(jù)流向控制ADDC(Automatic Data Direction Con—tro1)功能,無需額外的編程,即可輕松管理RS一485半雙工通訊串口數(shù)據(jù)的傳送和接收。變頻器采用西門子的MM440,它有統(tǒng)一開放的USS通信協(xié)議,可方便的與PC機(jī)進(jìn)行通信,并可以在運(yùn)行中改變變頻器的運(yùn)行參數(shù)。
系統(tǒng)運(yùn)行前,首先在PC機(jī)上設(shè)定變頻器的內(nèi)部參數(shù),電機(jī)的轉(zhuǎn)速和溫度的額定值;同時(shí)開啟控制器ARM,進(jìn)行數(shù)據(jù)采集和運(yùn)算控制。通過485總線,PC機(jī)可對主傳動(dòng)系統(tǒng)的主、從電機(jī)同步和烘房溫度的控制進(jìn)行實(shí)時(shí)監(jiān)測。圖1僅針對拉幅熱定型機(jī)的同步系統(tǒng),所以只用了一個(gè)ARM控制器,如果需要擴(kuò)展到多單元的同步控制,增加被監(jiān)控的單元和控制量,可利用485接口,方便地接人多個(gè)ARM控制器。
3 上位機(jī)和變頻器
PC機(jī)與變頻器的通信采用USS協(xié)議。該協(xié)議由SIEMENS AG定義,主要以RS一485總線方式將多臺(tái)西門子公司生產(chǎn)的變頻器、直流調(diào)速器或PLC等終端設(shè)備與工業(yè)控制計(jì)算機(jī)相連,實(shí)現(xiàn)遠(yuǎn)程監(jiān)控。USS協(xié)議是開放的,所以為用戶開發(fā)自己的基于該協(xié)議的軟件產(chǎn)品提供了可行性。這樣不僅有利于降低開發(fā)成本,而且能充分滿足特定項(xiàng)目的需要,方便日常的工控網(wǎng)絡(luò)維護(hù)。
USS協(xié)議支持多點(diǎn)聯(lián)接,支持主一從存取方式,用于單主站系統(tǒng),較多可鏈接32個(gè)站。USS協(xié)議支持可變和固定報(bào)文長度,報(bào)文格式簡單,通信字符格式為:1位起始位、1位停止位、1位校驗(yàn)位、8位數(shù)據(jù)位,波特率較高可達(dá)18715Kbps。
圖2為變頻器MM440的通信報(bào)文結(jié)構(gòu),對報(bào)文的具體字符含義不做過多解釋,詳見文獻(xiàn)[1],強(qiáng)調(diào)一點(diǎn)MM440支持BiCo(二進(jìn)制互聯(lián)連接)技術(shù),用戶可更方便的對它進(jìn)行參數(shù)的控制。

在變頻器與PC機(jī)進(jìn)行485通信前,對于MM440的參數(shù)設(shè)置至關(guān)重要。首先將所有參數(shù)復(fù)位到出廠設(shè)置:
P0010(調(diào)試參數(shù)過濾器):30
表示為工廠的設(shè)定值;
P970(工廠復(fù)位)=1
表示所有參數(shù)都復(fù)位到它們的缺省值;
設(shè)置參數(shù):P0700(選擇命令源)=5,
表示C0M 鏈路的USS設(shè)置;
PIO00(頻率設(shè)定值的選擇)=5,
表示可通過USS對變頻器進(jìn)行控制;
P2010(USS波特率)=6,
表示通信波特率選9600;
P2011(USS地址號)等于1,
表示變頻器1的地址為1;
P2009(USS規(guī)格化)等于1,
表示數(shù)值是以絕對十進(jìn)制數(shù)的形式發(fā)送[即4000(十進(jìn)制)(=0FA0hex)等于40.00Hz];
P2012(USS協(xié)議的PZD(過程數(shù)據(jù))長度):2,
表示PZD傳輸?shù)氖强刂谱趾驮O(shè)定值,共2個(gè);
P1013(USS協(xié)議的PKW 長度)=4,
表示用4個(gè)字節(jié)讀寫各個(gè)參數(shù)的數(shù)值;
P2014(USS的停止傳輸時(shí)間(ms))=X,
表示允許用戶設(shè)定一個(gè)時(shí)間X,在經(jīng)過這個(gè)時(shí)間以后,如果USS通道接收不到報(bào)文,就將產(chǎn)生故障信號F07O。
上位機(jī)和變頻器通信采用VB6.0編程[2],程序編制上采用事件驅(qū)動(dòng)的通信方式。串口每接收16個(gè)字符便激活一個(gè)OnComm()事件,在On—Comm()消息處理函數(shù)中,加入相應(yīng)的處理代碼,實(shí)現(xiàn)對變頻器參數(shù)的在線修改[3]。
4 上位機(jī)和ARM
嵌入式控制器采用三星公司的32位微處理器S3C44B0,芯片的內(nèi)核是16/32位ARM7TDMI精簡指令結(jié)構(gòu)處理器,是一種低功耗,通用微處理器內(nèi)核,特別適合于對價(jià)格比較敏感產(chǎn)品的設(shè)計(jì)[4]。S3C44B0芯片除了微處理器內(nèi)核外,在芯片中還集成了許多外圍設(shè)備,如8通道10位ADC,1個(gè)I2C— BUS控制器,LCD控制器,2通道UART。較重要的是它可以移植操作系統(tǒng)uClinux進(jìn)行管理。uClinux是一個(gè)優(yōu)秀的嵌入式操作系統(tǒng),它很適合那些沒有MMU(Memory Management Unit)的處理器。沒有MMU 的處理器在嵌入式領(lǐng)域中應(yīng)用相當(dāng)普遍。針對uClinux內(nèi)核的二進(jìn)制代碼和源代碼都經(jīng)過重新編寫,以緊縮和裁剪基本的代碼。這就使uClinux和標(biāo)準(zhǔn)Linux 2.0內(nèi)核相比非常小,但它仍然保持了Linux操作系統(tǒng)主要優(yōu)點(diǎn)。
本系統(tǒng)中,我們用帶uClinux操作系統(tǒng)的S3C44BOX控制器,用它自帶的一路10位ADC,方便的對拉幅熱定型機(jī)的烘房溫度進(jìn)行較高精度的數(shù)據(jù)采集;通過I2C總線和外圍計(jì)數(shù)芯片實(shí)現(xiàn)兩路電機(jī)轉(zhuǎn)速的采集。一個(gè)UART用作485總線接口,與PC機(jī)通信;一個(gè)LCD控制器直接接3.5寸的STN液晶器,方便觀察。由于uClinux本身已經(jīng)做好網(wǎng)絡(luò)的移植,本系統(tǒng)采用網(wǎng)絡(luò)芯片RTL8019AS把嵌入式接入以太網(wǎng),用戶可以通過瀏覽器訪問該控制系統(tǒng)的運(yùn)行數(shù)據(jù),實(shí)現(xiàn)對系統(tǒng)的遠(yuǎn)程監(jiān)控[5]。
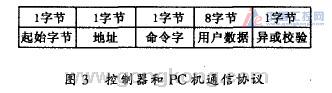
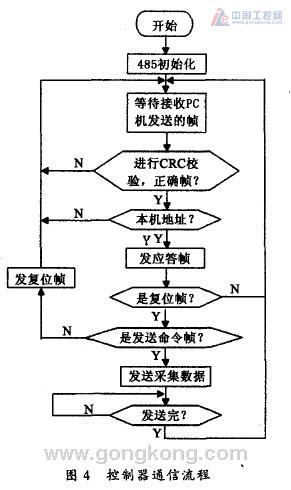
在拉幅熱定型機(jī)中,作為主傳動(dòng),帶動(dòng)布鋏的主、從電機(jī)的線速度同步,是保證加工質(zhì)量的關(guān)鍵,控制算法通常在PC機(jī)中完成,由于本系統(tǒng)采用32位微處理器,所以完全可以在作為下位機(jī)的ARM控制器中完成。PC機(jī)僅用于監(jiān)測和變頻器通信,大大減輕了負(fù)擔(dān)。而且S3C44B0具有很好的移植性,可以作為模塊方便的掛在485總線上。嵌入式控制器S3C44B0和PC機(jī)之間,我們定義了下面的收發(fā)協(xié)議,如圖3所示。其中命令包括復(fù)位命令和發(fā)送命令,若接收方在約定時(shí)間內(nèi)未收到發(fā)送命令幀,則發(fā)送復(fù)位幀,雙方回到通信程序的開始,清空緩沖區(qū),然后重新同步,具體流程如圖4所示。
 |
聯(lián)系我們 Contact Us
如果您對我公司產(chǎn)品有任何疑問,請致電 |
 |
客戶服務(wù) Customer Service
免費(fèi)服務(wù)溫馨體貼:免費(fèi)提供設(shè)計(jì)方案、免費(fèi)提供安裝指導(dǎo)。 |
 歡迎掃描關(guān)注微信公眾號 |
